AdaBoost小结
AdaBoost
总结一下AdaBoost
参考文献:西瓜书,南瓜书,"ADDITIVE LOGISTIC REGRESSION: A STATISTICAL VIEW OF BOOSTING"
集成学习
集成学习(ensemble learning)通过构建多个个体学习器,并将它们结合在一起构成集成学习器来完成学习任务。
集成学习的两个关键要素就是个体学习器(基学习器)和结合策略。
- 假设个体学习器错误率相互独立的前提下,可以证明随着集成数量的增加,集成错误率将以指数级下降并趋于0.
根据结合策略的不同,目前集成学习的方法可大体分为Boosting和Bagging两大类。
Boosting
Boosting(提升学习)是一族将弱学习器提升为强学习器的算法,个体学习器之间存在强依赖关系,必须串行生成。
通常的工作机制是:先训练出一个基学习器,根据基学习器的表现对训练样本的分布进行调整,使先前分类错误的样本在后续得到更多关注,然后基于调整后的分布进行训练下一个基学习器。最后将基学习器进行结合。
AdaBoost
AdaBoost是Boosting算法里著名的代表,标准的AdaBoost只适用于二分类任务。
假设训练集为\(D = \{(\boldsymbol{x}_1, y_1),...,(\boldsymbol{x}_m, y_m)\}\),其中\(\boldsymbol{x}_i \in \mathbb{R}^n\),\(y_i \in \{-1, +1\}\)为样本的类标记。假设训练集\(D\)里的样本服从某个分布\(\mathcal{D}\),即\(\boldsymbol{x} \sim \mathcal{D}\)。
第\(t\)轮训练的基分类器记为\(h_t(\boldsymbol{x})\),基分类器的加权和记为\(H(\boldsymbol{x})\),最终的集成分类器记为\(F(\boldsymbol{x})\)
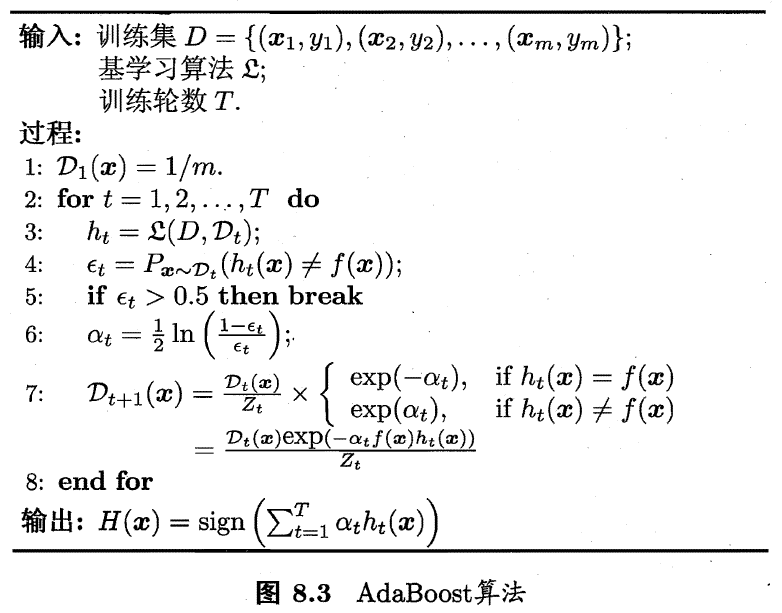
- AdaBoost算法需要详细解释的地方有两处:①基分类器\(h_t\)的权重为何采用第6行的公式来计算②样本分布为何采用第7行的公式来更新
AdaBoost的损失函数——指数损失
根据西瓜书的推导方法,AdaBoost采用的损失函数为指数损失函数:
\[ l_{exp}(H|\mathcal{D}) = \mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}}[e^{-yH(\boldsymbol{x})}] \]
其中\(H(\boldsymbol{x})\)是基分类器的加权和,\(y\)是样本的类标记。
\[ H(\boldsymbol{x}) = \sum_{t=1}^T \alpha_t h_t(\boldsymbol{x}) \]
贝叶斯最优错误率
- 最小化指数损失将使最终的集成分类器\(F(\boldsymbol{x})\)满足贝叶斯最优错误率:
\[ F(\boldsymbol{x}) = \arg\max_y P(f(\boldsymbol{x})=y|\boldsymbol{x}) \]
当指数损失得到最小化时,对应的条件期望 \(\mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}}[e^{-yH(\boldsymbol{x})}|\boldsymbol{x}]\) 也一定得到最小化。
\[ \mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}}[e^{-yH(\boldsymbol{x})}|\boldsymbol{x}] = e^{-H(\boldsymbol{x})} P(y=1|\boldsymbol{x}) + e^{H(\boldsymbol{x})} P(y=-1|\boldsymbol{x}) \]
此时条件期望对\(H(\boldsymbol{x})\)的偏导数为0:
\[ \frac{\partial \mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}}[e^{-yH(\boldsymbol{x})}|\boldsymbol{x}]}{\partial H(\boldsymbol{x})} = -e^{-H(\boldsymbol{x})} P(y=1|\boldsymbol{x}) + e^{H(\boldsymbol{x})}P(y=-1|\boldsymbol{x}) = 0 \]
解得
\[ H(\boldsymbol{x}) = \frac{1}{2} ln\frac{P(y=1|\boldsymbol{x})}{P(y=-1|\boldsymbol{x})} \]
因此有
\[ F(\boldsymbol{x}) = sign(H(\boldsymbol{x})) = sign(ln\frac{P(y=1|\boldsymbol{x})}{P(y=-1|\boldsymbol{x})}) = \begin{cases} 1, & P(y=1|\boldsymbol{x}) > P(y=-1|\boldsymbol{x}) \\ -1, & P(y=1|\boldsymbol{x}) < P(y=-1|\boldsymbol{x}) \end{cases} \\ = \arg\max_y P(f(\boldsymbol{x})=y|\boldsymbol{x}) \]
基分类器权重公式
- 权重\(\alpha_t\)应最小化带权基分类器\(\alpha_t h_t\) 在 $_t $ 上的指数损失
\[ \alpha_t = \arg\min_\alpha l_{exp}(\alpha h_t|\mathcal{D}_t) \]
注意到\(yh_t(\boldsymbol{x})\in \{-1, +1\}\)
\[ l_{exp}(\alpha_th_t|\mathcal{D}_t) = \mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}_t} [e^{-y\alpha_th_t(\boldsymbol{x})}] \\ \]
指数损失\(l_{exp}(\alpha_th_t|\mathcal{D}_t)\)最小化时,\(l_{exp}(\alpha_th_t|\mathcal{D}_t)\)对基分类器的权重\(\alpha_t\)的偏导数为0:
\[ \frac{\partial l_{exp}(\alpha_th_t|\mathcal{D}_t)}{\partial \alpha_t} = -e^{-\alpha_t}(1-\epsilon_t) + e^{\alpha_t} \epsilon_t = 0 \]
解得
\[ \alpha_t = \frac{1}{2} ln(\frac{1 - \epsilon_t}{\epsilon_t}) \]
从这里还可以看出,当\(\epsilon_t > 0.5\)时有\(\alpha_t < 0\)。
这说明如果某一个基分类器比随机猜测的效果还差的时候,这个基分类器的权重应当取负数。与其留下效果不好的基分类器,倒不如直接舍弃,所以算法第5行要求基分类器的错误率要小于0.5才继续训练。
样本分布更新公式
- 下一轮训练的基分类器\(h_t\)应最小化基分类器加权和\(H_{t-1}+\alpha_th_t\)在原始数据分布\(\mathcal{D}\)上的指数损失\(l_{exp}(H_{t-1}+\alpha_th_t|\mathcal{D})\)
\[ h_t(\boldsymbol{x}) = \arg\min_h l_{exp}(H_{t-1}+\alpha_th|\mathcal{D}) \]
\(l_{exp}(H_{t-1}+\alpha_th_t|\mathcal{D})\)展开可以写成: \[ l_{exp}(H_{t-1}+\alpha_th_t|\mathcal{D}) = \mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}} [e^{-yH_{t-1}(\boldsymbol{x})}(e^{-yh_{t-1}(\boldsymbol{x})})^{\alpha_t}] \]
根据算法第5行,\(0 < \epsilon_t \le 0.5\),所以\(\alpha_t \ge 0\)。最小化\(l_{exp}(H_{t-1}+\alpha_th_t|\mathcal{D})\)等价于最小化\(l_{exp}(H_{t-1}+h_t|\mathcal{D})\)
\[ l_{exp}(H_{t-1}+h_t|\mathcal{D}) = \mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}} [e^{-y(H_{t-1}(\boldsymbol{x})+h_t(\boldsymbol{x}))}] = \mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}} [e^{-yH_{t-1}(\boldsymbol{x})} e^{-yh_t(\boldsymbol{x})}] \]
将\(e^{-yh_t(\boldsymbol{x})}\)用泰勒公式展开到二阶近似代替,并注意到\(y^2 = h_t(\boldsymbol{x})^2=1\)
\[ l_{exp}(H_{t-1}+h_t|\mathcal{D}) \approx \mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}} [e^{-yH_{t-1}(\boldsymbol{x})} (1-yh_t({\boldsymbol{x})+\frac{y^2h_t(\boldsymbol{x})^2}{2}})] \\ = \mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}} [e^{-yH_{t-1}(\boldsymbol{x})} (1-yh_t({\boldsymbol{x})+\frac{1}{2}})] \]
所以
\[ h_t(\boldsymbol{x}) = \arg\min_h \mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}} \mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}} [e^{-yH_{t-1}(\boldsymbol{x})} (1-yh({\boldsymbol{x})+\frac{1}{2}})] \\ = \arg \max_h \mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}}[e^{-yH_{t-1}(\boldsymbol{x})}yh(\boldsymbol{x})] \]
配上一个归一化用的常数因子
\[ \frac{1}{Z_t} = \frac{1}{\mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}} [e^{-yH_{t-1}(\boldsymbol{x})}]} \]
原式可以改写成
\[ h_t(\boldsymbol{x}) = \arg \max_h \mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}}[\frac{e^{-yH_{t-1}(\boldsymbol{x})}}{\mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}} [e^{-yH_{t-1}(\boldsymbol{x})}]}yh(\boldsymbol{x})] \]
再令
\[ \mathcal{D}_t(\boldsymbol{x}) = \frac{\mathcal{D}(\boldsymbol{x})e^{-yH_{t-1}(\boldsymbol{x})}}{\mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}} [e^{-yH_{t-1}(\boldsymbol{x})}]} \]
不难证明\(\mathcal{D}_t\)表示一个新的分布,考虑\(\mathcal{D}_{t+1}\)和\(\mathcal{D}_t\)的关系
\[ \mathcal{D}_{t+1}(\boldsymbol{x}) = \frac{\mathcal{D}(\boldsymbol{x})e^{-yH_{t}(\boldsymbol{x})}}{\mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}} [e^{-yH_{t}(\boldsymbol{x})}]} \\ = \frac{\mathcal{D}(\boldsymbol{x}) e^{-yH_{t-1}(\boldsymbol{x})}e^{-y\alpha_th_t(\boldsymbol{x})}}{\mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}} [e^{-yH_{t}(\boldsymbol{x})}]} \\ =\mathcal{D}_t(\boldsymbol{x})e^{-y\alpha_th_t(\boldsymbol{x})} ·\frac{\mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}} [e^{-yH_{t-1}(\boldsymbol{x})}]}{\mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}} [e^{-yH_{t}(\boldsymbol{x})}]} \]
这就得到了算法第7行的样本分布更新公式。
在新的分布下最小化分类误差
原式又可以改写成
\[ h_t(\boldsymbol{x}) = \arg \max_h \mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}_t} [yh(\boldsymbol{x})] \]
这表明理想的\(h_t\)是在新的分布\(\mathcal{D_t}\)下最小化指数损失。由\(y,h(\boldsymbol{x})\in \{-1, +1\}\),有
\[ yh(\boldsymbol{x}) = 1 - 2 \mathbb{I}(y \ne h(\boldsymbol{x})) \]
于是原式等价于
\[ h_t(\boldsymbol{x}) = \arg \min_h \mathbb{E}_{\boldsymbol{x} \sim \mathcal{D}_t} \mathbb{I} (y \ne h(\boldsymbol{x})) = \arg \min_h P(y \ne h(\boldsymbol{x})) \]
这说明\(h_t\)不仅在分布\(\mathcal{D}_t\)下最小化指数损失,同时也在最小化分类误差